I’ve been using a Yaesu G-5500 Azimuth and Elevation rotator for the last seven years. It has been used to rotate various Yagi antennas, initially a single 9 element DK7ZB for 144Mhz, that was replaced with 2×8 element 144Mhz Yagi antennas. Then a 67 element 1296 MHz Yagi was added followed by a Horn antenna with a modified LNB for 10 GHz rain-scatter reception.

The G-5500 is capable of rotating and elevating quite large EME arrays IF care is taken to ensure the system is well balanced. Unfortunately the balance of the array is not normally maintained as it is elevated so the elevation (EL) rotator can at times be under significant load. Quite often people forget that in addition to the antennas there’s also the weight of the power divider, the coaxial cable and Low Noise Amplifiers (LNA) which tends to make the array rear-end heavy. To try and balance my setup I added a forward facing pole with dumbbell weights to add some counter-balance weight to the front-end. This worked fine until about six months ago when I noticed that the antennas would sometimes stick on the way down. Fortunately the tracking controller I use monitors to ensure that the rotator does move when instructed to and to protect the motor it will timeout if no movement is detected. To get the array to move down I would need to elevate a few degrees up and then down. The rotator would then lower the antennas.
I tried to rebalance things by adding more weight to the front and this seemed to help… for a while.
Five minutes into the recent ARI EME contest and the elevation rotator finally failed. It failed when I tried to raise the array! After carefully checking the cabling to the rotator and then finally at the connector socket on the rotator I discovered that one half of the AC motor winding measured open-circuit. As the G-5500 rotator units have limit switches it’s possible that the fault could be either due to a faulty switch or the actual motor winding itself. I don’t believe there is a way of knowing which it is until the rotator is stripped down which is far from an easy exercise.
I needed a solution fairly quickly, the ARRL EME contest was only a few weeks away, the weather had turned and we were going through what seemed to be long spells where it was wet and windy.
Solution:
I considered the following options:
-
- Repair the existing unit.
-
- Replace with a new G-5500 unit.
-
- Replace with a different make of rotator.
-
- Use a satellite actuator.
After careful consideration I decided to implement a solution that uses a satellite actuator. There were several factors that influenced this decision, they were time to fix, hardware availability, cost, beam heading accuracy and my future EME plans.
While heading accuracy is not so critical using Yagi antennas on 144MHz this is not the case when using a dish antenna on the GHz bands. At some point in the future I will focus my EME activity on one or more of the GHz bands. Local electrical noise simply continues to rise making 144MHz EME operation very difficult at times.
Moving to a satellite actuator would hopefully provide:
-
- A solution that has minimal backlash (one of the issues with many off the shelf rotators)
-
- Flexibility in terms of elevation measurement.
-
- Construction using basic DIY tools.
Design:
I spent time researching online how people were using a satellite actuator to elevate an EME Yagi array / dish antenna. One of my key requirements was to have a solution that would attach directly on top of the G-5500 azimuth (AZ) rotator in the same way as the original Elevation unit. I also wanted a means of providing a direct drive (no backlash) to a device used for elevation readout. This could be a simple potentiometer or some form of encoder.
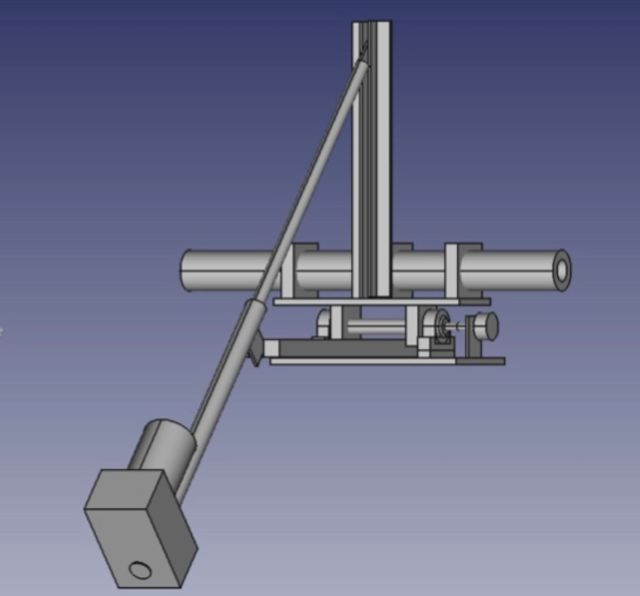
I came up with the initial design shown above. Further thought went into this along with research into sourcing suitable parts, availability and costs. I was able to source most of the material from two or three eBay sellers.
The final solution was developed with the following in mind:
-
- Use of easily obtained parts.
-
- No special tools required. With the exception of a bench pillar drill, the final solution was constructed using basic hand tools (hacksaw, files, tape measure etc.).
-
- Easy replacement of the original G-5500 elevation rotator.
-
- Direct drive of a simple 500R potentiometer or encoder for elevation readout.
-
- The positioning, choice of the actuator (length of extension) and length of “push-up arm” should form an equilateral triangle when the array is elevated to 60 degrees.
-
- Easily adapted for use with a 1 to 2m diameter dish at some point in the future.
Choice of actuator:
Prior to this project I had only ever seen photos of an actuator. Having researched what’s available to purchase online it became clear that there were many different manufacturers and the prices varied considerably. I’d recently read a thread on one of the EME forums where a number of well known EME operators (with very large EME antenna arrays) mentioned that they were using a genuine ScrewJack actuator. I researched this and found that they are available in standard and heavy duty versions. I decided to purchase the ScrewJack 18” heavy duty QARL3618 actuator. I ordered this late on Sunday night and it arrived on Tuesday. Now I have to confess, this really is heavy duty, it’s clearly over-specified for my current setup but it should have no issues moving a large dish at some point in the future.
Rotation Shaft:
Having looked online at lots of EME Yagi arrays that used an actuator for elevation many tend to move the actual cross-boom which rotates in some form of clamps. I considered adopting this approach but it did not offer a simple means of having a direct drive for the elevation pot / encoder and if / when I replace the Yagi array with a dish I would not have a cross-boom. I therefore decided to have two aluminium plates where the top one rotated on a 20mm solid aluminium shaft. The end of this shaft would be reduced to 6mm for the attachment of a pot / encoder.
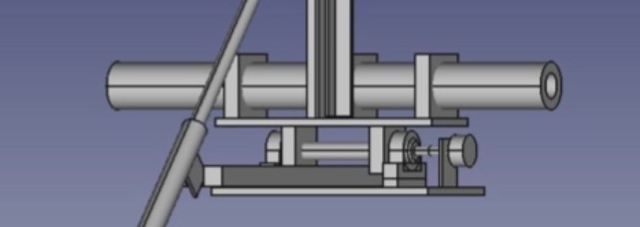
Two 20mm pillow block bearings are used to secure the shaft to the bottom aluminium shelf. Not owning or having access to a lathe, one of the challenges was how to reduce the 20 mm diameter shaft down to 6mm. I was able to do this by fitting the two bearings onto the shaft and placing them on a flat surface. Then rotating the shaft enabled me to mark the centre point on the end of the shaft. The bare shaft was then held vertically in a vice and using the mark centre-punched ready for drilling. Using a spirit level, G-clamps and vice to ensure the shaft was vertical, with great care, I was able to drill a 6mm diameter hole in the end of the aluminium shaft. An off-cut from a potentiometer shaft was then super-glued into the end of the 20mm shaft. Clearly to a Mechanical Engineer this is far from accurate but it resulted in a perfectly useable solution. As it happens I needed to extend the 6mm shaft inside the waterproof box that houses the 500R pot so I used back-to-back flexible coupler so any minute “wobble” (not that I could see any by eye) was not an issue.
With the rotation of the 20mm shaft being used to indicate the elevation angle it must move with the upper shelf. I initially planned to use some form of clamp to fix the upper shelf to the shaft. The common “exhaust clamp” doesn’t appear to be available in such small sizes. Ideally a machined aluminium block with a 20mm hole would be used but time was against me to have these made. I considered using plastic style pipe-clamps but in the end I used two more pillow-block bearings. This resulted in a simple heavy-duty solution but of course the shaft rotated freely. To lock the upper shelf to the shaft I drilled a 6mm hole through the shelf and the shaft and used a 6mm bolt to lock the two together. The upper two bearings no longer rotate. I have greased them well and in theory they could always be used as replacements for the lower bearings should they eventually fail due to water ingress etc.
Installation:
The rotator swap-over went well although I did get caught out by a couple of “Gotchas” that I’d overlooked in my design and planning! Both related to fixing the new rotator system onto the existing Yaesu Azimuth rotator.
Yaesu use a square U-shaped piece made of thick steel to fasten the two rotators together. When I came to fasten the new setup in place I found that the original M8 bolts used to fasten the two rotators together were too short. The two aluminium shelves are a lot thicker (150mm wide and 10mm thick!) Fortunately I had a number of much longer bolts spare and was able to cut four down to the required length.
The second “Gotcha” also related to the same square U-shaped piece.

I had forgotten (well it was seven years ago!) that this had a rectangular slot cut in the bottom of it to allow it to sit flat on the top of the azimuth rotator housing. The cast Ali housing has two parallel ridges (lines) cast into it to help align the mast clamps when used. I clearly hadn’t allowed for these so I had to improvise using some extra large diameter “repair washers” to raise the new aluminium shelf above the level of these ridges.
The final solution:

The photo above was taken during the initial testing of the new elevation system, and before the cabling was tidied! The maximum elevation is ~ 70 degrees which is fine for EME here in the UK.
The following photo shows the waterproof enclosure positioned on the end of the rotation shaft. At present this houses a 500R potentiometer that’s used for the elevation readout.

Results:
I’m active again on EME! I mentioned earlier that time was one of the factors that was factored into my solution. I had in my mind that I wanted to be QRV for the ARRL EME contest on 10th Oct 2020 and I was, so the end result is good. I believe that I met my design objectives, and have a solution that is as good, if not better than most of what’s currently available “off-the-shelf” and at a much lower cost.
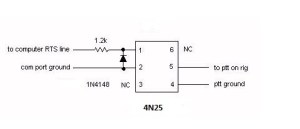
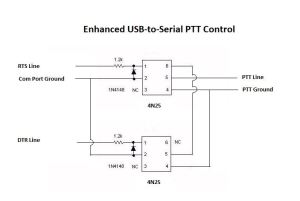
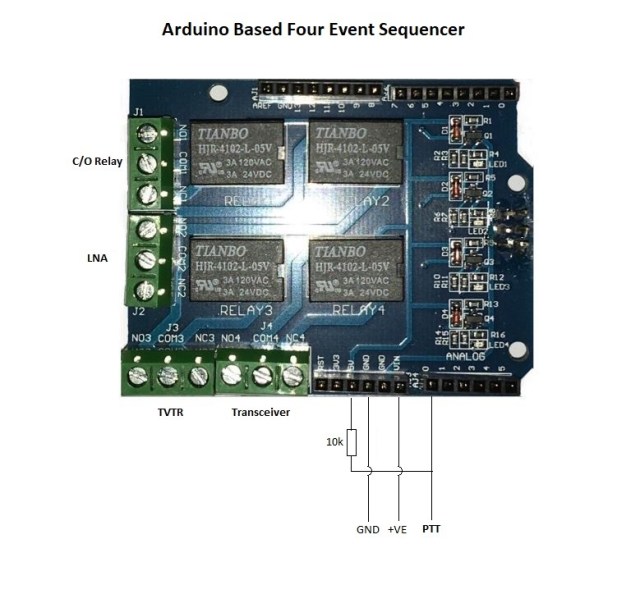
For simplicity and to get operational quickly I have the actuator auto-tracking the Moon using a simple interface board to the standard Yaesu G-5500, K3NG controller and PstRotator software.
If you do not need an elevation rotator that can “flip” your antennas up and over through 180 degrees I would seriously recommend that you consider using a satellite actuator.
Things left to do:
-
- The actuator uses a DC motor which does produce some electrical noise when running. Whilst this is not bad on 2m, it is on the lower bands. I need to add some shielding and filtering to reduce this.
-
- The actuator motor is currently powered by a 28V SMPS. With the voltage reduced to 25V the elevation speed is approximately 90 seconds for 45 degrees elevation. I plan to replace this SMPS with a linear power supply with PWM. This will then provide variable speed control and a reduction in SMPS noise.
-
- I’m currently using a 500R potentiometer for elevation read out as this was the easiest and quickest way of getting operational. I plan to replace this with either some form of encoder or maybe a digital inclinometer.