My small (~ 65cms) dish 10GHz EME experiments have been great fun. More information can be found here. The next step is to install a larger 1.2m off-set dish. This will initially use my existing AZ / EL system, the AZ side will need to be upgraded as soon as possible. With the inability to track the Moon accurately i.e. typically in 0.1 degree steps or better, I’m going to have to manually “nudge” the dish to keep the moon in the “bore-sight”. To help do this some additional aid is needed, and this is where the noise meter comes in. It can also be used to optimise and validate the performance of your feed, dish and overall receive setup.
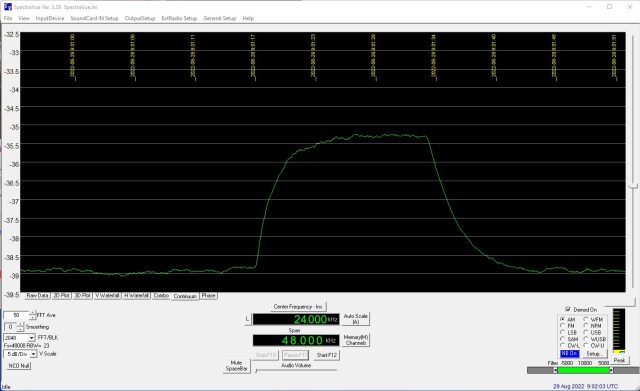
To the best of my knowledge a noise meter hardware solution cannot be purchased “off the shelf”. For a software solution SpectraVue can be used in Continuum mode. This will also provide hard-copy of your system performance. I have been using SpectraVue with good results.
So why go to all the bother and expense of making a noise meter? It’s primarily to have a good old fashioned analog meter that will clearly indicate noise peaks, it’s also an instrument that will work both indoors and outdoors, not require a computer, connect directly to the transverter IF output, give a clear visual indication to help track, optimise and measure the performance of my EME system(s).
Searching the Internet highlighted three main sources of information published by VK5BZ, G4NNS and DB6NT. Having read most of what I could find I decided that I would build a unit adopting ideas from these main sources. I wanted a unit that would:
- Be modular, i.e have separate RF frontend amplifier with a detector plus metering backend.
- Work with both 28MHz and 144MHz transverter IF outputs.
- Incorporate Receive / Transmit switching to protect the RF amplifier devices and detector board.
- Operate off 12v – 15V so that a battery can be used outdoors.
- Allow for additional Band Pass Filters (BPF) if needed.
- Provide detector voltage output for an extra large external meter.
- Possibly incorporate a switchable attenuator for self checking.
This resulted in the following two board designs:
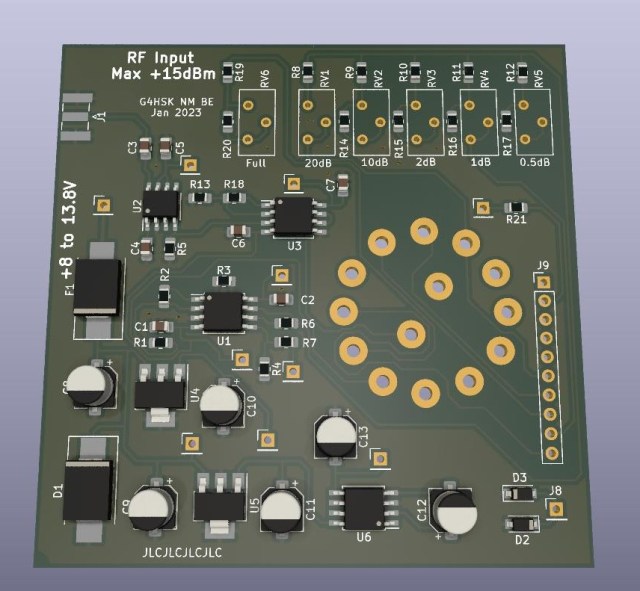
Noise Meter RF Amplifier Board
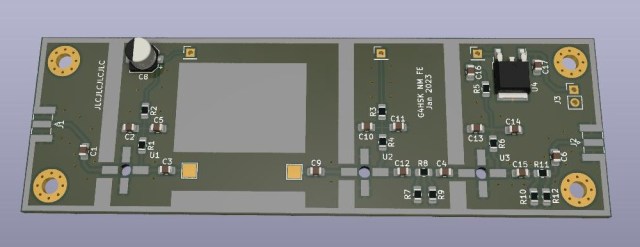
Noise Meter AD8307 Detector and Metering Board
This was supposed to be a Xmas holiday project. The board designs were started but not finished! They were sized to fit the “German tin plate boxes” that are popular amongst microwave constructors. If I’m honest in the end I did rush things a little once I realised that they were still not finished and Chinese New Years celebrations would soon be upon us. I usually finish a board design, park it for a week or so and then revisit to check and spot any “undocumented features”. This method of error detection seems to work, needless to say with the time constraint I did not do this and when I came to build the boards I dicovered that I’d I messed up the two voltage regulator footprints on the detector + metering board!! Fortunately the current drawn is very low and I was able to mount the devices vertically “standing up on their legs”.
Here are the two finished modules:

Noise Meter 144MHz IF Amplifier Board

Completed AD8307 Detector and Metering Board Underside
Completed AD8307 Detector and Metering Board Topside
The RF Frontend board is for 144MHz IF, it uses 3 x MAR-8A+ devices and produces about around +80dB gain. With -100dBM input from the spectrum analyser tracking generator the Band Pass Filter (BPF) response looks something like this over a 500MHz span:
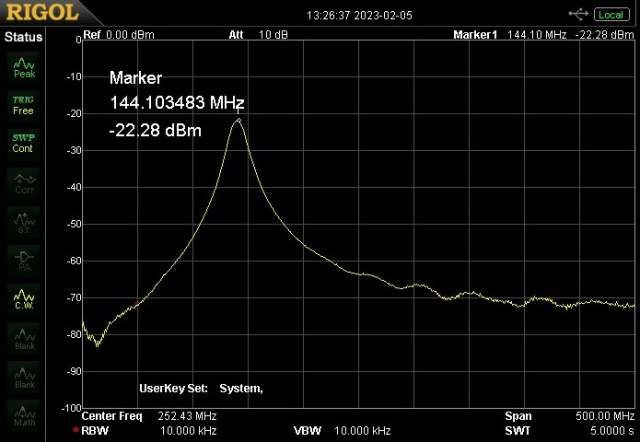
144MHz IF Amplifier Onboard BPF Response
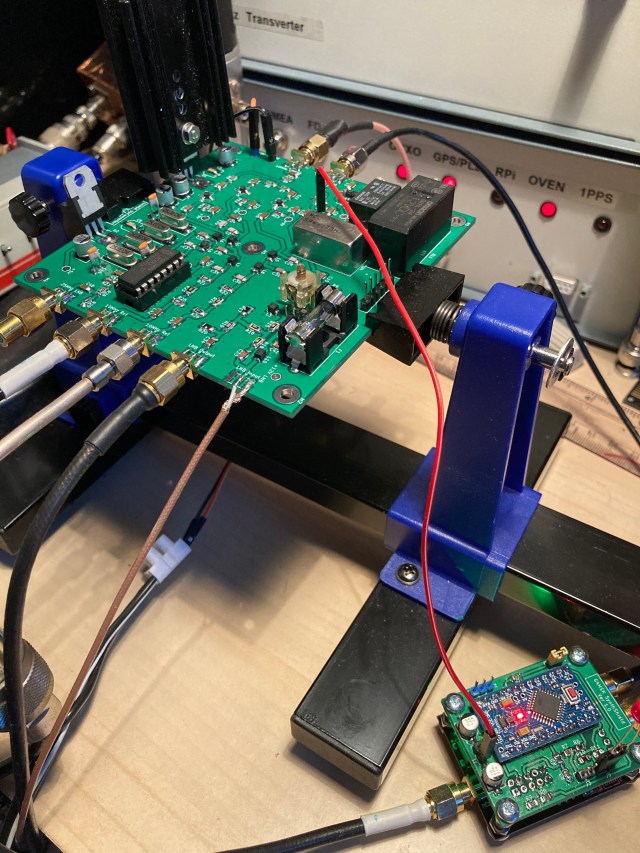
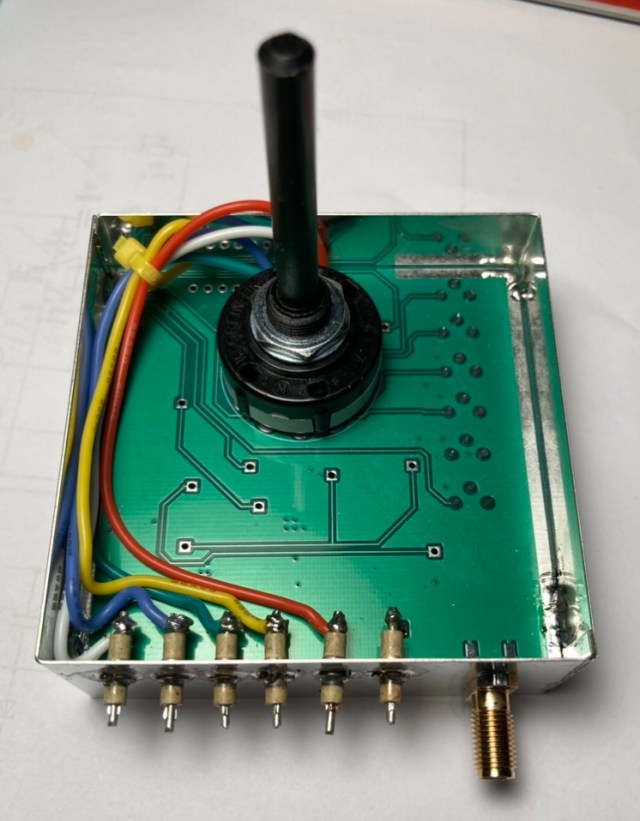
The completed modules being tested:
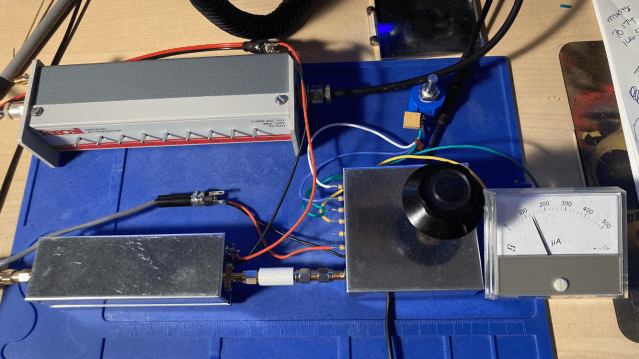
I’m currently using the modules as shown in the photo above. They will eventually be housed in a suitable enclosure along with the extra modules to protect the unit when transmitting plus a 28MHz frontend board.
The noise meter appears to work as expected. Tests with switched attenuators inline before and after the frontend amplifier module suggest that both the detector and metering stages are working correctly and levels are well within the optimum input range of the AD8307.
Using the “standard” VK3UM EMECalc software to calculate the expected Sun and Moon noise from my setup I can see that my setup is working as expected, I’m currently able to measure 4dB of Sun noise. With such a small dish measuring Moon noise is more of a challenge, measurements so far done when the Moon was near maximum elevation and the dish dish pointing away from roof tops indicated ~ 0.1dB of Moon noise.
Lessons learnt:
- Don’t rush boards and double check component footprints!
- Think more about the positioning of any inter-stage screening.
Things to do next:
- Purchase a suitable enclosure.
- Construct 28Mhz Frontend.
- Incorporate Receive / Transmit switching (protection).
- Possibly incorporate a switchable attenuator for self checking.
Acknowledgements:
- VK5BZ for his excellent article describing his noise meter.
- G3NNS for his excellent article describing his noise meter.
- DB6NT for his excellent article describing his noise meter.