
The prolonged hot and dry spell that the UK and most of Europe has experienced has meant that there’s been no rain to enhance the capabilities of my small 10GHz home setup. My small dish only has a clear take-off between approximately 230 – 360 degrees which is fine up-country but to receive anything in any other direction, particularly to the East I need good rain scatter / backscatter.
The lack of anything really new happening on the band got me looking at ways to improve my station. My ultimate goal on 10GHz has always been EME. Having read about the success a couple of stations have been having with a 1.2 metre dish I decided to see what I could hear using a smaller dish I had gather dust in the shed.
My current setup was using a very old PW Dish with a Penny-Feed. The “new” dish would be an aluminium perforated off-set dish (Lenson Heath 60) with a new feed horn. I’d heard that good results had been obtained using the Chaparral front section off an LNB mated to a piece of 22mm diameter copper pipe with an SMA transition. It just so happened that in my box of “bits not to be thrown away” I had the front section off a Goobay LNB plus the 22mm section.
I soon had a new feed put together ready for testing.
 The next step was to get the feed positioned correctly. With the new dish fixed in place and a 3D-printed clamp to hold the feed horn, as a starting point, I simply positioned the feed to where I expected a standard LNB and clamp would normally be.
The next step was to get the feed positioned correctly. With the new dish fixed in place and a 3D-printed clamp to hold the feed horn, as a starting point, I simply positioned the feed to where I expected a standard LNB and clamp would normally be.
Sun noise can be used to establish how well a dish and its feed are performing. In very simple terms the concept is point the dish at the Sun, record the noise level, then point the dish at a cold part of the sky and the difference in measured noise level gives an indication of how well your system is working. There are many excellent articles online that explain all of this in great detail, also software where you can define your system and it will calculate an expected level of noise. For more information look here.
I was keen to see how well things were working, based on what I’d read people were reporting figures of around 6dB Sun noise for an 85cm dish so my expectation was that I should see around 4.5dB of Sun noise using my 65cm dish. Clearly there are many things that can affect this measurement.
My first tests were encouraging I was seeing a little over 3.5dB of Sun noise.
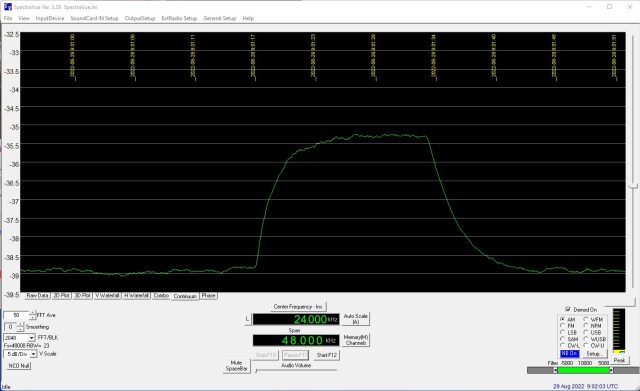
To ensure that what I was measuring was meaningful I used a stepped attenuator between output of the transverter and the input to the K3. By attenuating the input to the K3 in 1dB steps I could check that the measurement seen in SpectraVue did the same.

While doing all of this I realised that there was an EME contest coming up where hopefully a number of large 10GHz capable stations would be active. So if I was able to receive the 10GHz EME Beacon, DL0SHF located in Germany I should stand a chance of decoding some actual EME contacts taking place.
One of the first things that became evident in doing the Sun noise checks was that pointing the dish accurately was not easy! Even with this very small dish (most 10GHz EME stations use a dish upwards of 1.2m in size) 1 degree of azimuth movement would see the signal level fall away. Once the dish is aligned on the Sun / Moon you then need to track its movement. I had used my azimuth and elevation tracking system previously on 144MHz and 1296MHz EME with Yagi antennas where the system was more than adequate. The dish however was a totally different thing.
I spent several hours over a number of days tracking the Sun (peaking on noise) and drawing up a calibration table for my rotator system. I got to a point where using my calibration table I could point the dish and be within a degree or so.
The next step was to try and decode the DL0SHF beacon. At this point I knew my receive setup was working okay (but not optimised) but in addition to that there were three other key requirements:
- Accurate measurement and control of dish azimuth heading.
- Accurate measurement and control of dish elevation heading.
- Accurate frequency control and ability to manage Doppler shift.
The first two requirements were not ideal but should get me close 🙂 the third was fine as the K3 was able to do full Doppler tracking in 1Hz increments.
At the time of trying the Sun and the Moon headings were fairly close. For me this was both good and bad, it meant that there was more noise overall, the degradation was also fairly high but it also meant that I could check the dish alignment by first peaking on the Sun noise and then rotating the dish just a few degrees to where the Moon should be. After half an hour or so I got my first decodes from DL0SHF at around -20dB.
![]()
To receive DL0SHF your receiver should be tuned to 10368.024MHz and the Doppler auto tracking (in WSJT-x) set to “On DX Echo”. This should place the signal around 1000Hz. I seem to decode it approximately 50Hz high.
Over the next few hours I tracked the Moon manually and continued to successfully decode the beacon.
The best signal strength I managed was -17dB.
![]()
At the time another station using a 1.2m dish posted a report of around -11dB so I was not way off what was to be expected for the size of dish I’m using.
Next was the EME contest. Who would I be able to decode?
The first station was OZ1LPR, I checked the beacon first and then tuned to his frequency.
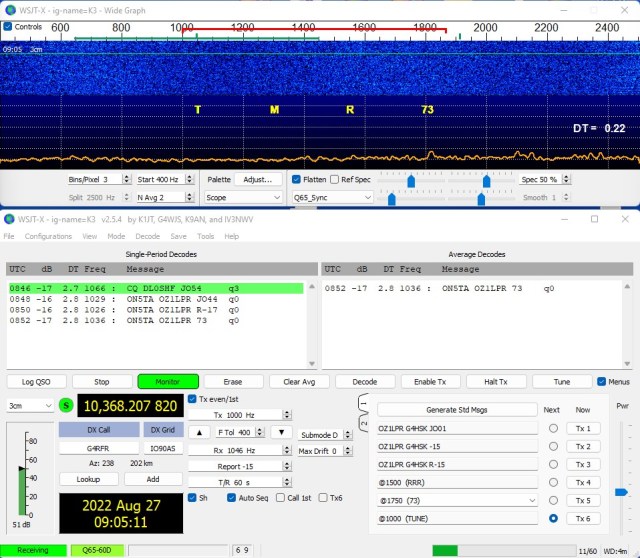
I decoded three other new stations, GB2FRA, DL0EF and W3SZ. Here are some screen shots of the activity decoded (click on image to enlarge):









Clearly all those stations were running large dishes and high power so all credit goes to them, but it was still a great buzz to see those decodes on my side. What was also surprising was that they were mostly audible in the loud speaker and not just visual on the computer screen.
The hardest part of this journey was tracking the Moon with my current system. A larger dish would make it even more difficult. I decided to change my tracking system software to work to 0.1 decimal places and recalibrate both azimuth and elevation followed by an extended period tracking the Sun. Just to get a good baseline to build upon.
I was pleasantly surprised, I was able to track within 1dB of maximum Sun noise. Now clearly this is still with a small 65cm dish. Going to a 1.2m dish would result in a much greater variation.
![]()
The above image shows the Sun being tracked (for maximum noise) over a 2.5h period and with a maximum deviation of 1dB.
Key lessons learnt?
- Fun can be had monitoring EME with a small dish setup.
- The new Chaparral feed horn seems to work well.
- Acurate tracking of the Moon / Sun is hard. Azimuth being probably the most difficult.
- Any backlash in the rotator system is bad.
- You should aim for 0.1 degree or better tracking accuracy.
- Having accurate frequency control (GPSDO) is a must.
- Being able to track Doppler shift automatically is a major bonus.
What’s next?
- Improve the rotator / tracking system.
- Optimise the position of the feed horn.
- Weatherproof the feed assembly.
- Get a bigger dish!
